- О нас

- Наши услуги
- Ваша отрасль
- Ресурсы
- Новости и блог
You order 500 consumer drones from a Chinese factory. The spec sheet looks solid — 30-minute flight time, 4K camera, 7 km video transmission range. The factory sends pre-shipment photos of units on the test bench, motors spinning. You ship the order. Three weeks later, your customer support inbox fills up: drones drifting sideways in hover mode, video freezing at 200 metres, units tumbling on takeoff after an IMU calibration error the factory missed.
Drone quality failures are expensive in a category where returns are common, logistics costs are high, and regulatory exposure is real. The problem is that most importers treat drone inspection like a physical goods check — cosmetic, packaging, label. A functional drone QC protocol is an entirely different discipline. This guide explains exactly what flight stability, hovering precision, and video transmission tests should look like, and what benchmarks an inspector needs to verify before a single unit ships.
Key Takeaways
- Hovering stability failures — the most common drone complaint — are caused by IMU calibration errors, propeller imbalance, or PID tuning issues that only a hover test can catch.
- Video transmission range claimed by manufacturers is almost always measured in ideal, open-air, FCC-maximum-power conditions. Real-world QC testing at shorter ranges under interference conditions is a more reliable proxy for product performance.
- A drone QC checklist must separate functional flight tests from visual inspection and apply tighter AQL thresholds to flight-critical failures — a hovering drift failure is a safety issue, not a cosmetic defect.
Why Drone QC Is a Different Category
The Three Failure Modes That Drive Returns
Consumer drone returns cluster around three distinct failure patterns, each traceable to a specific production step. Understanding which step causes which failure is essential to knowing when and what to inspect:
1. Stability and hovering failures: The drone drifts, oscillates, tilts, or fails to hold position. Root causes include IMU sensor calibration errors from the factory, propeller balance defects, motor asymmetry, or flight controller PID tuning that was never validated against actual flight. Pilot Institute's IMU calibration guide explains that incorrect accelerometer or gyroscope calibration causes the drone to misinterpret its orientation — leading to unstable hover, uncontrolled tilting, or drifting that neither the pilot nor the drone can correct in real time.
2. Video transmission failures: Feed quality drops, freezes, lags, or cuts out at ranges far below the marketed specification. Usually caused by antenna soldering defects, incorrect frequency band selection, or transmission module firmware that was not paired to the correct regional RF profile (FCC, CE, SRRC).
3. Return-to-home and GPS hold failures: The drone cannot accurately hold a GPS position or return to its launch point within acceptable tolerance. This is caused by GPS module hardware defects, incorrect compass calibration, or firmware that was not validated after motor installation changed the magnetic environment around the flight controller.
Why Functional Testing Requires a Different AQL Approach
Standard AQL sampling tables (ANSI/ASQ Z1.4) are designed for defects that affect product quality in degrees — a scratch on a product is bad, but twenty scratches on units in a batch does not make the product dangerous. Flight failures are different. AQL standards classify defects by severity: Critical (danger to users), Major (product unfit for use), Minor (cosmetic/reduced functionality). For drones, a hovering stability failure or a return-to-home malfunction should be classified as Critical — zero tolerance — not merely Major. An inspector should never apply AQL 1.0 to a defect that can cause a flyaway or uncontrolled descent over people or property.
Flight Stability Testing: What to Check and How
IMU and Sensor Calibration Verification
The IMU (Inertial Measurement Unit) is the foundational stability component of every drone. It bundles accelerometers, gyroscopes, and often a magnetometer that together give the flight controller real-time attitude data hundreds of times per second. UAV IMU research from BeyondSky confirms that well-calibrated MEMS IMUs in commercial drones should support stable hover within ±0.5 degrees of attitude — any more than that in calm indoor conditions indicates a calibration or hardware issue.
Factory IMU calibration is not permanent. IMUs can develop bias errors from thermal cycling during production, rough handling, firmware updates, or simple accumulation time. The inspector's job is to verify that calibration was performed correctly before packaging — not that it was performed at some point during production.
Pre-flight static test procedure for QC: Power on the unit. Access the app or controller diagnostics screen. Confirm accelerometer readings with Z-axis close to 9.81 m/s², X and Y near zero. Confirm gyroscope values are stable and return to zero after gentle rotation. Any persistent non-zero bias on X or Y axis at rest = calibration failure.
Hover Stability Test: The Core Flight Performance Check
The hover test is the single most important functional check for any rotary-wing drone. A comprehensive drone testing guide prescribes a structured hover test protocol: lift the drone to a defined altitude in GPS-assisted mode (2–3 metres is practical for indoor factory test areas), release all control inputs, and observe for a minimum of 60 seconds. The unit must maintain position with minimal drift and require no active pilot correction to prevent the drone from moving.
Pass/fail criterion for standard consumer drones: position drift should not exceed ±0.5 metres from the GPS hold point during a 60-second stationary hover under indoor conditions with no wind. SkyRover's sample testing checklist for professional-grade drones uses the same ±0.5m hover stability variance as their primary performance baseline — with RTK-enabled units expected to hold within ±2cm for precision applications. Consumer units should achieve the 0.5m standard at minimum.
What causes hover drift failures specifically: propeller imbalance creates vibration that confuses the IMU; motor RPM asymmetry causes constant corrective thrust in one direction; PID loop tuning errors cause oscillatory behavior (the drone bobs up and down or sways side-to-side in a repeating cycle). These are all factory-detectable with a proper hover test — they do not appear in a static bench test.
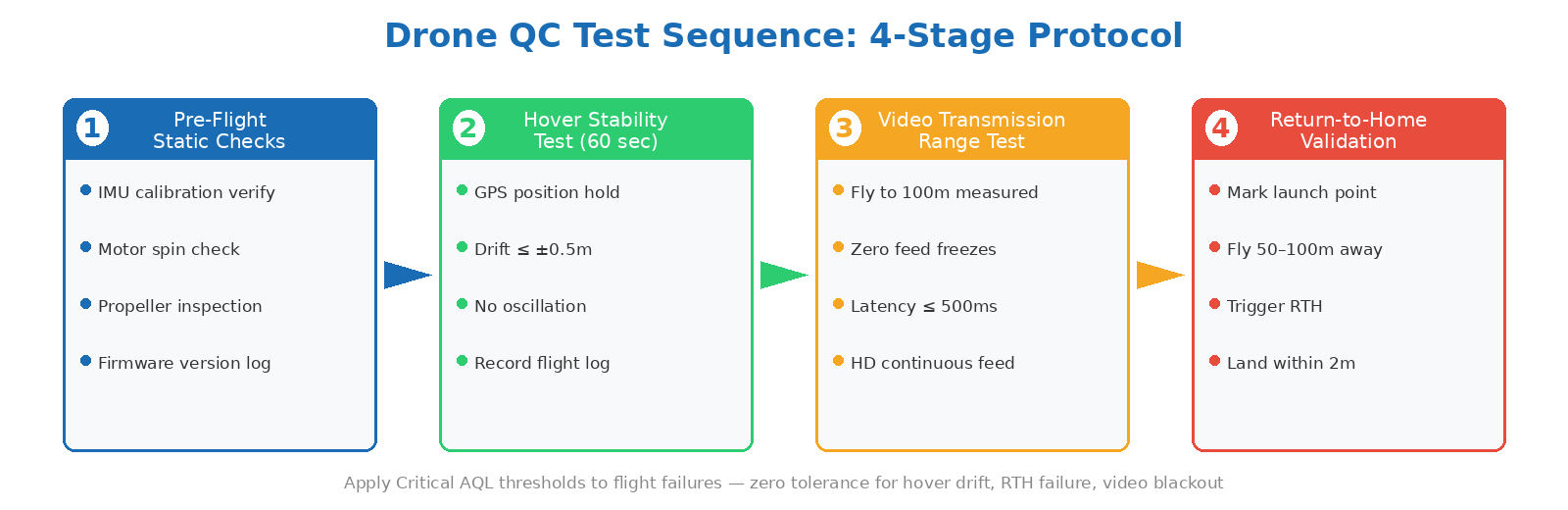
Drone QC test sequence: four stages from IMU pre-flight verification to video transmission range validation.
Propeller and Motor Pre-Flight Checks
Before any flight test, a structured visual and physical check should confirm: propeller blades are crack-free, correctly installed (CW and CCW orientations match the motor arms), and firm in their mount with no wobble. Motor bearings should rotate freely with no grinding, irregular resistance, or scraping that indicates debris or bearing damage. Drone test protocols recommend powering up motors to a low RPM without flight, then listening and watching for any vibration, rhythmic ticking, or oscillation that suggests imbalance — all detectable before the unit lifts off.
A during-production inspection of drone assembly should include watching the propeller balancing and motor installation process live, not just reviewing the finished product. Dynamic balancing machines are used in proper factory setups to verify propeller balance — ask your factory to confirm their balancing step and whether the machine is calibrated before your inspection date.
Hovering Precision: GPS, Altitude Hold, and Return-to-Home
GPS Position Hold Accuracy
Consumer drones using standard GPS (not RTK) typically achieve 2–3 metre horizontal position accuracy in ideal satellite conditions. The relevant test for QC is not absolute GPS accuracy — that is determined by satellite geometry and cannot be controlled at the factory — but rather the drone's ability to use its GPS signal correctly in position-hold mode. JOUAV's drone stability guidance notes that drones with proper GPS stabilization and robust motors should hover steadily in winds up to 20–30 mph — a useful benchmark for wind resistance specification verification.
For factory QC, the relevant test is satellite lock acquisition time and the consistency of position hold. From a cold start in an open outdoor area, the drone should acquire GPS lock from enough satellites (typically ≥7) within 90 seconds. Failure to lock, unusually slow acquisition, or inconsistent satellite counts across units of the same model indicate GPS module hardware variability — worth flagging as a Major defect if multiple units in the AQL sample exhibit it.
Return-to-Home Accuracy Testing
Return-to-home (RTH) is a safety-critical function. The standard test: mark the launch point with tape, take off in GPS mode, fly 50–100 metres in a straight line at 10 metres altitude, then trigger RTH. The drone should navigate back to the marked point and land within 1.5–2 metres of it. A landing offset greater than 3 metres from the launch mark indicates either GPS module drift, compass interference from the motor stack, or an RTH altitude/approach algorithm issue in firmware.
| Test | Pass Standard | Fail Threshold | Defect Class |
|---|---|---|---|
| Hover stability (60-sec GPS hold) | Drift ≤ ±0.5m | Drift > ±1.0m or continuous oscillation | Critical |
| IMU calibration (static check) | Z≈9.81m/s², X/Y≈0 | Persistent non-zero X/Y at rest | Critical |
| GPS satellite lock (cold start) | ≥7 satellites within 90s | Fewer than 6 or >180s to lock | Major |
| Return-to-home landing accuracy | Landing within 2m of launch mark | Landing offset > 3m | Major |
| Motor vibration (pre-flight spin check) | Smooth, no rhythmic noise | Grinding, ticking, or visible wobble | Critical |
| Video feed — 100m open field | Continuous, no freeze or pixelation | Freeze, dropout, or lag >500ms | Major |
Video Transmission Range: Testing What Matters
Understanding Manufacturer Range Claims
Drone manufacturers market transmission range in FCC mode — the maximum radio output power permitted in the United States — under ideal open-air conditions with no interference, no obstacles, and maximum antenna alignment. Heliguy's DJI transmission systems analysis notes that in CE-regulated markets (EU), the same drone achieves significantly shorter range because power limits are lower — DJI's Lightbridge-equipped drones are rated at 2.2 miles in CE versus 3.1 miles in FCC. Budget consumer drones from China using Wi-Fi transmission — rated by their manufacturers at 500m–1km — typically achieve 100–200m in real suburban environments with interference.
This means your QC test cannot simply try to replicate the manufacturer's stated maximum range. It would require open countryside with no RF interference, which is not available at a factory. Instead, test at a shorter, standardized distance under real-world interference conditions and use the result as a comparative quality indicator across units in the batch.
Practical Factory Transmission Range Test Protocol
The factory test standard that matters for importers: fly the drone to 100 metres in the open area adjacent to the factory (or the largest open area available) and observe video feed quality. At 100 metres, any drone rated above 500m should be delivering a clean, continuous, stutter-free HD feed. A feed that freezes, drops resolution, or exceeds 500ms of lag at 100 metres is a hardware defect — antenna soldering issue, module seating problem, or frequency configuration error — not just a range limitation.
DroneZon's FPV video transmission analysis explains that OcuSync-type systems achieve significantly longer range than Wi-Fi at the same power by using more effective digital compression and OFDM interference rejection — the point being that identical-looking drones from different factories can have dramatically different real-world transmission performance based on their actual link system, not their spec sheet.
For your QC checklist, specify the transmission test explicitly: drone to fly to exactly 100m from controller position (measure with tape or GPS), inspector to note video feed resolution, freeze count, and any lag for a 60-second observation window. Maximum acceptable freeze count: zero. Maximum acceptable sustained lag: under 500ms. Any unit failing this test at 100m = Major defect.
Latency: The Hidden Quality Indicator
Video transmission latency — the delay between what the drone camera sees and what appears on the controller screen — is rarely tested in factory QC but directly affects the user experience and safety of the product. OcuSync 1.0 achieves approximately 160–170ms latency at close range under ideal conditions. Budget drone Wi-Fi transmission typically delivers 200–400ms, and poor-quality implementations can reach 600ms or higher — the point at which the drone's apparent position on screen trails its actual position enough to make precision control unreliable.
Latency testing at the factory can be done simply: mount a clock or timer visible to the drone's camera, record the display screen simultaneously with the clock, and compare the displayed time on the drone's feed to the actual time. The difference is your transmission latency. Units exceeding 500ms latency should be treated as a Major defect for any drone marketed as responsive or FPV-capable.
Building the Drone QC Checklist
AQL Thresholds for Flight-Critical Tests
Drone QC requires a tiered approach to defect classification. Functional flight defects — drift, crash on takeoff, gimbal malfunction, RTH failure — are not cosmetic problems subject to standard AQL 2.5 Major tolerances. Effective QC checklists must specify pass/fail criteria clearly for each test, including the sample size and who provides the testing equipment.
Recommended AQL structure for drone pre-shipment inspection: Critical flight failures (crash on takeoff, uncontrolled flight, total video blackout) — zero acceptable; Major functional failures (hover drift >1m, RTH offset >3m, video freeze at 100m) — AQL 0.65; Minor defects (cosmetic scratches, minor latency, label placement) — AQL 2.5.
Equipment and Site Requirements for Drone Inspection
Unlike most factory inspections, drone QC requires an outdoor test area. This is a logistical requirement your checklist must address explicitly — and one many importers forget to specify until the inspector arrives. Minimum requirements: an open area of at least 100m × 50m with no overhead obstructions (powerlines, trees), no RF-heavy environments (do not test adjacent to active factory machinery or cellular base stations), and clear weather (wind under 5 m/s, no rain). Specify in your pre-shipment inspection checklist that the factory must confirm outdoor test area availability before the inspection date is confirmed.
Equipment the factory should provide: a fully charged battery for each test unit, the designated remote controller, the official app (DJI Fly, manufacturer app, or equivalent). Equipment the inspector needs: a tape measure or measuring wheel for the 100m range test, a smartphone for timing and recording, and ideally a slow-motion video recording capability to document any hover oscillation or motor vibration.
When to Inspect — And What Stage Catches What
A pre-shipment inspection catches finished-unit defects: calibration errors, assembly mistakes, firmware versions. But it will not catch systematic production issues — a batch of propellers from a bad sub-supplier lot, for example, or a flight controller firmware version with a known stability bug — until you've already tested a large sample of units and found the pattern.
A during-production inspection at 30–50% production completion lets you sample early-stage units and run flight tests before the entire order is assembled and packaged. This is particularly valuable for drones because rework is difficult once units are boxed: disassembling a packaged drone to re-balance a propeller or re-flash a firmware costs time and risks additional damage. Catching a systematic motor-installation orientation error in production is far cheaper than reworking 500 units at the warehouse.
Frequently Asked Questions
Can a drone be inspected at the factory without an outdoor flight area?
Partially, but not completely. Static bench tests — IMU calibration check, motor spin test, video feed at close range, firmware version verification, label and packaging inspection — can all be done indoors. But hover stability, GPS position hold, return-to-home accuracy, and transmission range tests require outdoor space. If the factory cannot provide an outdoor test area, your inspector can verify everything except the flight tests — which means you are accepting flight performance risk unverified. Factor that into your sourcing decision.
How many units need to be flight-tested in a pre-shipment inspection?
There is no universal standard, but flight testing is treated as functional testing under AQL methodology — typically a smaller sample than the visual inspection sample, given the time and resource cost. A practical approach for a batch of 500 units: visual and static inspection on the full AQL sample (around 50–80 units at AQL 2.5 GII), with flight testing on a subset of 5–10 units. If any flight test failure is found, expand to test 10–15 more. Two or more flight failures in any expanded sample = hold the shipment.
What documentation should I require from the factory for drone flight tests?
Ask for the factory's outgoing QC flight test records — most reputable drone factories run at least a brief hover test on every unit before boxing. Ask for the test log, including pass/fail records, the firmware version loaded, and the date of testing. Also request the calibration record for the IMU and compass, as these are typically performed once per production batch rather than on every unit. If the factory cannot produce this documentation, that is a process gap that a factory audit should surface before you place your order.
What is the most common drone defect found during factory inspections?
Hover drift caused by propeller imbalance or IMU calibration issues is the most frequently cited flight quality defect in third-party drone inspection reports. It is almost always the result of the factory skipping or rushing the propeller balancing step under production pressure. The defect is invisible in a static inspection and only reveals itself in flight — which is precisely why a hover test must be on every drone inspection checklist, not optional.
Drone quality failures found after shipment are almost always preventable at the factory. TradeAider's inspection team includes functional flight test protocols — hover stability, GPS position hold, and video transmission checks — in pre-shipment inspection checklists for electronics buyers sourcing drones from China. Book a pre-shipment inspection or use the Inspection Charge Calculator to plan your QC budget for your next drone order.

Похожие статьи

Развивайте свой бизнес с услугами TradeAider
Нажмите кнопку ниже, чтобы войти непосредственно в систему услуг TradeAider. Простые шаги от бронирования и оплаты до получения отчетов легко выполнить.
